ГОСТ 27122-86
ГОСТ 27122-86 Роботы промышленные агрегатно-модульные. Модули электромеханические. Типы, основные параметры
Категории ГОСТ 27122-86 по ОКС:- Статус документа:
- действует, введён в действие 01.01.1988
- Название на английском языке:
- Industrial aggregate-module robots. Electromechanic modules. Types, main parameters
- Дата актуализации информации по стандарту:
- 15.09.2019, в 11:28 (более года назад)
- Вид стандарта:
- Стандарты на продукцию (услуги)
- Дата начала действия ГОСТа:
- 1988-01-01
- Дата последнего издания документа:
- 1987-02-13
Коды документа ГОСТ 27122-86:
- Код ОКП:
- 387500
- Код КГС:
- Т51
- Код ОКСТУ:
- 3875
- Число страниц:
- 5
- Назначение ГОСТ 27122-86:
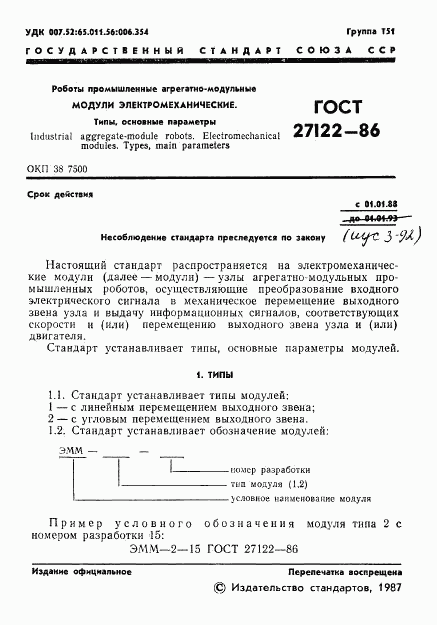
- Настоящий стандарт распространяется на электромеханические модули - узлы агрегатно-модульных промышленных роботов, осуществляющие преобразование входного электрического сигнала в механическое перемещение выходного звена узла и выдачу информационных сигналов, соответствующих скорости и (или) перемещению выходного звена узла и (или) двигателя. Настоящий стандарт устанавливает типы, основные параметры модулей
- ГРНТИ индекс(ы):
- 5030
- Ключевые слова документа:
- модули электромеханические, осуществление преобразования входного электрического сигнала в механическое перемещение выходного звена угла и выдачи информацционных сигналов, роботы промышленные агрегатно-модульные, станкоинструментальная промышленность
Нормативные ссылки, связанные с ГОСТ 27122-86:
- Стандарт ссылается на ГОСТы:
- ГОСТ 8592-79, ГОСТ 18709-73, ГОСТ 12126-71
Скачать ГОСТ 27122-86 вы можете в следующих версиях:
Тип файла:
Дата добавления:
Загрузок:
Размер:
Ссылка на скачивание:
Добавлен:
12/12/2011 02:02
Скачиваний:
120
Размер файла:
0.28 Мб
Ссылка для скачивания:
Добавлен:
12/12/2011 01:57
Скачиваний:
142
Размер файла:
0.13 Мб
Ссылка для скачивания:
-
 страница 1
страница 1
-
 страница 2
страница 2
-
 страница 3
страница 3
-
 страница 4
страница 4
-
 страница 5
страница 5